Серводвигатель схема подключения. Сервоприводы MG995 и MG996 tower pro. Коллекторные и бесколлекторные моторы
Как уже говорилось, сервопривод это точный исполнитель который получая на вход значение управляющего параметра стремится создать и поддерживать значение на выходе исполнительного элемента.
В данной статье рассмотрим что же из себя представляют управляющие импульсы, а также то, как лучше подключать сервоприводы к Arduino.

Используемые компоненты (купить в Китае):
. Управляющая плата
. Соединительные провода
Полезная вещь для проверки сервориводов
О том как входные импульсы преобразуются в сигналы управления мотором мы уже рассказали в этой , о самих сигналах управления мотором и их отличиях в различных типах сервоприводов можно прочитать . В данной же статье речь пойдет непосредственно о управляющих импульсах, будут даны примеры как их сгенерировать на Arduino.
Управляющий сигнал представляет из себя импульсы с нужной нам шириной, которые посылаются с определенной частотой. Для рассматриваемых нами сервоприводов частота посылания импульса почти всегда будет около 50 Гц (это примерно 1 раз в 20мс), а ширина импульса будет лежать в пределе от 544мкс до 2400мкс.
Как видно из картинке, импульс шириной в 544мкс выставит выводной вал в положение 0°, 1520мск соответствует углу в 90°, а 2400мкс соответствует 180°.

Изменяя ширину импульсов в данных пределах мы сможем точно задавать угол поворота выводного вала, но об этом чуть позже. На данном этапе статьи хочется рассказать о том как подключить сервопривод к Arduino.
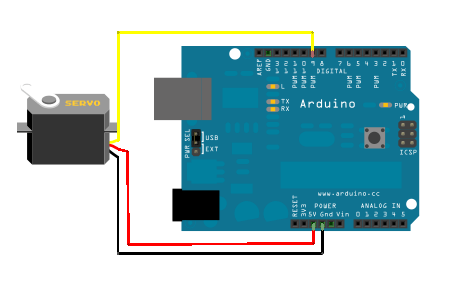
Для подключения к контроллеру от сервопривода тянется 3 провода обжатых стандартным 3 пиновым разъемом с шагом 2.54мм. Цвета проводов могут варьироваться. Коричневый или черный - земля (GND), красный - плюс источника питания (VTG), оранжевый или белый - управляющий сигнал (SIG).
Подключение сервоприводов к Arduino
У старых Ардуин, укомплектованных мегой 8, имеется всего три ШИМ вывода (digital 9,10,11), у Ардуин укомплектованных мегой 168 или 328 их 6 (digital 3,5,6,9,10,11). Семейство Arduino MEGA имеет на своем борту целых 14 ШИМ выводов.
Купить в России
В этой статье мы поговорим о сервоприводах в проектах Ардуино. Именно благодаря серводвигателям обычные электронные проекты становятся робототехническими. Подключение серво к Arduino проекту позволяет реагировать на сигналы датчиков каким-то точным движением, например, открыть дверцу или повернуть в нужную сторону сенсоры. В статье рассмотрены вопросы управления сервоприводами, возможные схемы подключения серво к ардуино, а также примеры скетчей.
Сервопривод – это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом.
Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
- Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота.
- Сделать небольшой шаг ногой, движение конечностью или головой.
- Для создания роботов-манипуляторов.
- Для реализации механизма рулевого управления.
- Открыть или закрыть дверку, заслонку или другой предмет.
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Схема и типы сервоприводов

Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.
 Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни. В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
 Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
 Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
 Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.
 Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).

(Использовано изображение с сайта amperka.ru)
Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс. Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.

При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный – к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам – принцип управления серво мы уже описывали ранее.
Не рекомендуется подключать мощные серво напрямую к плате, т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью – повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в “дергании” серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Скетч для управления сервоприводом в Arduino
Управление сервоприводом напрямую через изменение в скетче длительности импульсов – достаточно нетривиальная задача, но у нас, к счастью, есть отличная библиотека Servo, встроенная в среду разработки Arduino. Все нюансы программирования и работы с сервоприводами мы рассмотрим в отдельной статье. Здесь же приведем простейший пример использования Servo.
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
#include
Скетч для двух сервпоприводов
А в этом примере мы работаем сразу с двумя сервоприводами:
#include
Управление сервоприводом с помощью потенциометра
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
//Фрагмент стандартного примера использования библиотеки Servo void loop() { val = analogRead(A0); // Считываем значение с пина, к которому подключен потенциометр val = map(val, 0, 1023, 0, 180); // Преобразуем число в диапазоне от 0 до 1023 в новый диапазон - от 0 до 180. servo.write(val); delay(15); }

Характеристики и подключение SG-90
Если вы собрались купить самый дешевый и простой сервопривод, то SG 90 будет лушим вариантом Этот серво чаще всего используется в управлении небольшими легкими механизмами с углом поворота от 0° до 180°.
Технические характеристики SG90:
- Скорость отработки команды 0,12с/60 градусов;
- Питание 4,8В;
- Рабочие температуры от -30С до 60 С;
- Размеры 3,2 х 1,2 х 3 см;
- Вес 9 г.
Описание SG90
Цвета проводов стандартные. Сервопривод стоит недорого, он не обеспечивает точных настроек начальных и конечных позиций. Для того, чтобы избежать лишних перегрузок и характерного треска в положении 0 и 180 градусов лучше выставлять крайние точки в 10° и 170°. При работе устройства важно следить за напряжением питания. При сильном завышении этого показателя могут повредиться механические элементы зубчатых механизмов.
Сервоприводы MG995 и MG996 tower pro
Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Характеристики MG995
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
- Вес 55 г;
- Крутящий момент 8,5 кг х см;
- Скорость 0,2с/60 градусов (при 4,8В);
- Рабочее питание 4,8 – 7,2В;
- Рабочие температуры – от 0С до -55С.
Описание MG995
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения. При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов.
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Заключение
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод – непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.
Возможности Arduino очень разнообразны: от обычного контроля температуры и сбора данных до управления 3D принтерами и умными домами. Также с помощью этой платы можно программировать различные механизмы и даже роботов. Для таких целей очень часто применяются различные движки, моторчики и приводы.
Самыми распространенными и популярными в механизмах являются шаговые двигатели и сервоприводы. О последних мы и поговорим в этой статье. Сервоприводы являются самыми дешевыми и практичными в использовании моторчиками. Их размеры и масса малы, а комбинация из таких модулей поможет успешно создавать роботов.
Начнем знакомство с самым популярным из них, по-другому он еще называется SG90 (Tower Pro Micro Servo 9G). Сервопривод представляет небольшую коробку, в которую запрятан сам механизм. Научившись правильно писать программный код, можно управлять положением вала.
Для подключение сервопривода к Arduino , на плате используется 3 контакта (для подключения используются 3 провода “папа-папа”): питание (5V), заземление и аналоговый выход (расположены на панели digital ). Наглядная схема подключения изображена на рисунке ниже:
Внимание! При подключение более чем одной сервы или одной, но более мощной, можно допустить просадку напряжения на плате Arduino (из-за слабой стабилизации на плате) Поэтому, если подключаете более одного сервопривода, то контакты питания лучше подключать к отдельному источнику, чем к плате.
После того, как подключили, можно зайти в среду разработки Arduino IDE и опробовать первую программу для проверки работоспособности модуля. Также советуем использовать библиотеку Servo.h . Она уже встроена в Arduino IDE, а значит скачивать и устанавливать ее не нужно. И кстати, эта библиотека уже содержит в себе некоторые команды и тем самым упрощает работу с сервоприводом, избавляя нас от очень длинных и занимаемых много места кодов. Она содержит в себе следующие полезные команды:
- attach (номер_вывода) - инициализация сервопривода;
- write (угол) - поворот сервопривода на заданный угол;
- read () - получение текущего угла сервопривода.
Теперь рассмотрим первую программу с использованием сервопривода.
Данная программа позволит изменять угол поворота вала на сервоприводе с течением времени:
#include ; //используем библиотеку для работы с сервоприводом Servo servo; //объявляем переменную servo типа Servo void setup() //процедура setup { servo.attach(10); //привязываем привод к порту 10 } void loop() //процедура loop { servo.write(0); //ставим вал под 0 delay(2000); //ждем 2 секунды servo.write(180); //ставим вал под 180 delay(2000); //ждем 2 секунды }
#include ; //используем библиотеку для работы с сервоприводом Servo servo ; //объявляем переменную servo типа Servo void setup () //процедура setup servo . attach (10 ) ; //привязываем привод к порту 10 void loop () //процедура loop servo . write (0 ) ; //ставим вал под 0 delay (2000 ) ; //ждем 2 секунды servo . write (180 ) ; //ставим вал под 180 |
Наряду с контроллером и сенсорами, актуаторы являются важным составляющим всех без исключения роботов. Они вращают колеса робота, позволяя ему перемещаться в пространстве, и приводят в действие мощные манипуляторы, которыми он хватает предметы.
В этом уроке мы будем работать с одним из таких актуаторов, который называется сервоприводом (или сервомашинкой). В отличие от обычного электромотора, сервопривод представляет собой сложное составное устройство, состоящее из двигателя постоянного тока, шестеренного редуктора, потенциометра и электронной схемы. Всё это позволяет сервоприводу поворачивать вал строго на заданный угол, и удерживать его. С помощью таких приводов можно, например, сделать вот такой несложный манипулятор:
1. Подключение к Ардуино
Итак, как уже говорилось выше, сервопривод славится тем, что может поворачиваться на заданный угол. Как же мы будем указывать ему этот угол? Предлагаю использовать для этой цели переменный резистор, он же — потенциометр. Будем вращать ручку потенциометра, а контроллер будет командовать сервоприводу поворачиваться на соответствующий угол.
У потенциометра есть всего три вывода. Крайние подключим к +5В и земле, а центральный к аналоговому входу A0.
У сервопривода SG90 также имеется три контакта. Обычно они окрашиваются следующим образом:
- коричневый — земля;
- красный — питание +5В;
- оранжевый (или желтый) — сигнальный.
Сигнальный провод подключим в цифровому выходу №8. В итоге, получим такую схему:

Подключать оба устройства к Ардуино Уно удобнее через макетную плату:

2. Программа
Теперь напишем несложную программу, которая свяжет все элементы нашего аппарата строгой логикой. Все что нам требуется от контроллера — это:
- считывать показания с потенциометра в диапазоне от 0 до 1023;
- преобразовывать полученное число в угол от 0 до 180 градусов;
- передавать полученный угол на сервопривод.
Для написания программы используем наш . Задействуем блок сервопривода, блок чтения из аналогового порта и функцию отображения одного диапазона значений в другой.
Нажав в конструкторе кнопку «Arduino», откроем страницу с исходным кодом программы для среды Arduino IDE:
#include
Как видно из программы, для управления сервоприводом мы использовали библиотеку Servo . В этой библиотеке есть несколько полезных нам функций:
- attach(номер_вывода) — инициализация сервопривода;
- write(угол) — поворот сервопривода на заданный угол;
- read() — получение текущего угла сервопривода.
Для отображения множества чисел 0 — 1023 в множество 0-180, конструктор применил функцию map . Ту же самую операцию, можно было осуществить с помощью выражения:
int angle = (value / 1023.0) * 180;
Загружаем программу на Ардуино Уно, и смотрим что получилось!

Теперь, вы знаете что такое сервопривод, и можете легко им управлять. Вперед! К созданию роботов-манипуляторов и шагающих роботов-пауков!
Servoдвигатели - это тип электромеханических приводов, которые не вращаются постоянно,как DC / AC или шаговый двигателей, а перемещаются в определенное положение исохраняют его. Они применяются там, где не требуется непрерывное вращение. Серво приводы применяют там, где необходимоперейти к конкретной позиции,а затем остановиться и сохранять положение .Наиболеечасто серво двигатели используются для управлением положением руля воздушныхсудов и лодок т.д. Сервоприводы эффективно используются в этих областях, потомучто руль не нужно перемещать на 360 градусов и не требуют непрерывного вращениякак например колеса. В с ервоприводахтакже используется механизм обратной связи, поэтому он может обрабатыватьошибки и при позиционировании их исправить. Такая система называется следящей . Такимобразом, если поток воздуха оказывает давление на руль и отклоняет его, тосервопривод будет применять силу в противоположном направлении и попытаетсяисправить ошибку.Например, есливы скажете серво пойти и заблокироваться на 30 градусах, а затем попытаетесь повернутьего рукой, серво будут стараться, чтобы преодолеть силу и сохранить заданныйугол.
Сервоприводыприменяются также для контроля руля RC- автомобилей, робототехники и т.д. Существует много видов сервоприводов, но здесь мы сосредоточимсяна малых сервоприводы так называемых hobby . H obb y двигатель и его механизм управления встроен в один блок. Подключение осуществляеться спомощью трех присоединительных проводов . Мы будем использовать сервопривод FutabaS3003 .
FutabaS3003 проводки.
1.RED -> Управление позицией,питание +4.8В до 6В
2.BLACK-> Земля
3.WHITE -> Сигнал управления.
Управление Сервоприводом.
Управлятьсервоприводом легко с помощью микроконтроллера,не нужно никаких внешнихдрайверов.Просто подаваяуправляющий сигнал сервопривод будет позиционировать на любойзаданный угол.Частота управляющего сигнала обычно 50hz (т.е.период 20 мс), а длительность импульса задает величину угла.
Для FutabaS3003 яузнал следующие синхронизацию .Соотношение между шириной импульса иуглом поворота сервопривода, приводится ниже.Заметим,что этот сервопривод способен вращаться только между 0 и 180 градусов.
- 0.388ms= 0 градусов.
- 1.264ms= 90 градусов.
- (Нейтральнаяпозиция) 2.14ms= 180 градусов.
Управление Серво двигателем.
Вы можете использовать микроконтроллер AVR с функцией PWM дляуправления сервомоторов. Таким образом, PWM автоматически сгенерирует сигналыблокировки сервопривода и центральный процессор контролера освободится длядругих задач. Чтобы понять, как можно настроить и использовать PWM необходимоиметь базовые знания аппаратных таймеров и PWM модулей в AVR.
Здесь мы будемиспользовать AVR Timer модуль, который является 16bit таймером и имеет два канала PWM (А и B).
Частота центрального процессора составляет 16 МГц,эта частота - максимальная частота,на которой большинство AVR способны работать.Так же будем использовать делитель частоты на 64. Так таймера получат 16MHz/64 =250khz (4 мкс).Таймер установим в режим 14.
Функциитаймера в режими 14
- РежимFAST PWM
- T T OP Значение = ICR1
Такимобразом, мы устанавливаемICR1A = 4999,это дает нам PWM периода 20мс (50 Гц).Убедитесь что в режими выводаустанавленны правильные настройки COM1A1, COM1A0 (для PWM канала) и COM1B1,COM1B0 (для PWM канал B)
COM1A1= 1 и COM1A0 = 0 (PWM Источник)
COM1B1= 1 и COM1B0 = 0 (PWM канал B)
Теперь рабочий цикл может быть установлен путем настройки OCR1A иOCR1B регистров.Эти два регистрауправления PWM периодом Так как период таймера 4мкс (помните 16 МГц разделили на 64), Мы можем вычислить значения, необходимые для поворотасервопривод на определенный угол.
§ Servoугол 0 градусов требуется ширина импульса 0.388ms (388uS), поэтому значениеOCR1A = 388us/4us = 97
§ Servoугол 90 градусов требуется ширина импульса 1.264ms (1264uS), поэтому значениеOCR1A = 1264us/4us = 316
§ Servoугол 180 градусов требуется ширина импульса 2.140ms (2140uS), поэтому значениеOCR1A = 2140us/4us = 535
Такимобразом, мы можете вычислить значение OCR1A (или OCR1B для второгосервопривода) для любого угла.Заметимчтозначение OCR1x колеблются от 97 до535 для углов от 0 до 180 градусов.
Программа управления двигателем.
Демонстрационнаяпрограмма приведена ниже, показано, как использовать сервомоторов смикроконтроллером AVR. Работы программы очень проста, она начинается синициализации таймера и PWM.В начале фиксируеться сервопривод на 0 градусов, азатем перемещается на 90 градусов и подождатв некоторое время перемещается на135 градусов, и наконец, на 180градусов. Этот процесс повторяется до тех пор, пока привод подключен к питанию.
Параметрыдля правильной работы программы .
- LOW Fuse = 0xFF и HIGH Fuse = 0xC9
- Частота= 16 МГц.
- СервомоторклеймоFutaba S3003 .
- MCUявляется AtMega32 или однокристальный микроконтроллер ATmega16.
Схема

ПРИЛОЖЕНИЯ:



